Two Halves of the Same Picture — and a Small Experiment with Modern Tools
For most of my time at sea, a port call was something you experienced from the vessel side. The pilot boards, the tugs come alongside, the agent handles everything ashore. What any of that costs, who reconciles it afterwards, and how the numbers get checked — that part of the picture was simply not visible to me.
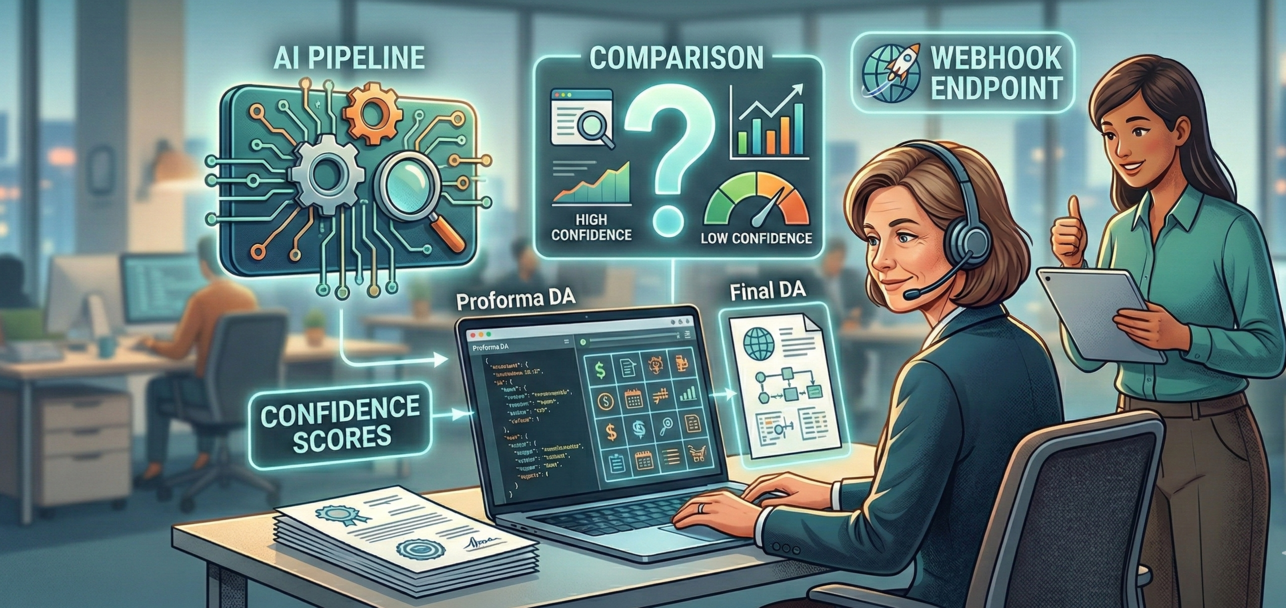
Joining my current firm on the commercial side changed that. Working across ship owning, operating, and chartering, I got my first real look at Disbursement Accounts — the Proforma DA that goes out before a vessel arrives with estimated costs, and the Final DA that comes back afterwards with the actual invoices and receipts attached. My colleague Gibin, over what became fairly regular lunch conversations, walked me through how the whole process works. It was one of those things that feels obvious once you understand it, but genuinely wasn’t until someone explained it properly.